








News









































¿Cómo leer los parámetros del motor síncrono del imán permanente?
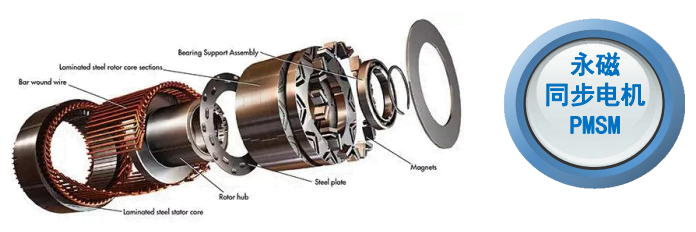
¿Cómo leer los parámetros del motor síncrono del imán permanente?
Entendiendo elParámetros del motor síncrono del imán permanente (PMSM)es la base de selección, aplicación, control y diagnóstico de fallas.
Estos parámetros generalmente se dividen en dos categorías:
Parámetros de placa/Parámetros de rendimiento básicos: estos generalmente se marcan directamente en la placa del motor o en la tabla de especificaciones de rendimiento del manual del producto, que los usuarios encuentran más comúnmente.
Parámetros de diseño/parámetros de circuito equivalente: estos parámetros son críticos para el análisis en profundidad, el control preciso y el modelado de simulación del motor. Por lo general, se encuentran en el apéndice técnico del manual del producto, documentos de diseño o requieren pruebas para obtener
A continuación se explica estos dos tipos de parámetros en detalle:
I. Parámetros de la placa de identificación / parámetros de rendimiento básicos
1. Potencia nominal:
Significado: la potencia mecánica que el motor puede emitir de forma continua, segura y de manera segura en condiciones nominal (voltaje nominal, velocidad nominal, carga nominal, condiciones de enfriamiento especificadas, etc.). La unidad suele ser kilovatio o potencia.
Visto como: Este es el parámetro central para seleccionar un motor para cumplir con los requisitos de carga. Asegúrese de que la potencia continua máxima requerida por la carga sea menor o igual a la potencia nominal del motor. Tenga en cuenta la distinción entre potencia nominal y potencia máxima (capacidad de sobrecarga a corto plazo)
2. Voltaje nominal:
Significado: El valor efectivo del voltaje de línea especificado durante el diseño y aplicado al devanado del estator del motor. La unidad es voltio.
Para un motor alimentado por el conductor, esto generalmente se refiere al valor equivalente del voltaje del bus del inversor DC convertido al lado de CA.
Cómo ver: debe coincidir con la capacidad de voltaje de salida del controlador. El voltaje demasiado alto dañará el aislamiento o causará saturación magnética; Demasiado bajo voltaje no podrá generar potencia nominal y par, degradación del rendimiento.
3. Corriente nominal:
Significado: el valor efectivo de la entrada de corriente de línea del estator de la fuente de alimentación cuando el motor sale la potencia nominal, la velocidad nominal y el voltaje nominal. La unidad es amperio.
Cómo mirar: utilizado para calcular la potencia de entrada, seleccione la capacidad de corriente del controlador (la corriente nominal del controlador debe ser mayor que la corriente nominal del motor), diseñe la línea de la fuente de alimentación y el dispositivo de protección de sobrecarga. También refleja indirectamente el tamaño de la pérdida de cobre.
Velocidad nominal:
Significado: la velocidad de rotación del rotor del motor a voltaje nominal, frecuencia nominal y potencia de salida nominal. La unidad es revoluciones por minuto.
Necesita coincidir con los requisitos de velocidad de la carga. Cómo entender si el motor está funcionando a una velocidad constante o no: debe ajustarse para funcionar a velocidad. Tenga en cuenta la diferencia entre la velocidad nominal y la velocidad máxima (limitado por la resistencia mecánica y la capacidad magnética débil)
5. frecuencia nominal:
Significado: La frecuencia de la fuente de alimentación cuando el motor está directamente alimentado por una fuente de alimentación sinusoidal (por ejemplo, la cuadrícula). Para los motores impulsados por un convertidor de frecuencia, este parámetro generalmente se refiere a la frecuencia de salida del controlador a velocidad nominal.
Cómo ver: para aplicaciones de frecuencia de potencia, debe coincidir con la frecuencia de la cuadrícula (50Hz o 60Hz). Para aplicaciones de frecuencia variable, este parámetro está directamente relacionado con la velocidad nominal (n = 60f /p, donde p es el número de polos).
6. Torque calificado:
El par mecánico generado por el motor cuando emite la potencia nominal a la velocidad nominal. Unidad: n · m.
La fórmula es: t = p/w, donde p es la potencia nominal (vatio) y w es la velocidad angular nominal (radian/segundo, w = 2πn/60, n es la velocidad nominal en rpm). Este es el parámetro central requerido para superar el par de resistencia cero de la carga. Tenga en cuenta la diferencia entre el par nominal y el par máximo (capacidad de sobrecarga a corto plazo).
7. Eficiencia:
La eficiencia nominal del motor se define como la relación porcentual de potencia mecánica de salida a la potencia eléctrica de entrada (pin = √3 * V clasificado, donde V es el voltaje nominal para los sistemas trifásicos). La fórmula n = (p_out / p_in) × 100% indica su capacidad de convertir la energía eléctrica en energía mecánica. Una mayor eficiencia reduce las pérdidas de energía (incluidas las pérdidas de cobre, las pérdidas de hierro, las pérdidas mecánicas y las pérdidas de fugas) al tiempo que reduce los costos operativos. Tenga en cuenta que la eficiencia que se muestra en las placas de identificación del motor generalmente solo refleja la condición nominal.
8. Factor de potencia:
Significado: la relación entre la potencia activa de entrada a la potencia aparente (cosφ) en condiciones de trabajo nominal. Refleja la relación de fase entre la forma de onda de corriente y voltaje y el grado de distorsión de corriente.
Cómo verlo: un factor de potencia alto significa una alta tasa de utilización de la red y menos "contaminación" a la red. PMSM generalmente tiene un alto factor de potencia (cerca de 1) en condiciones nominal. El controlador (inversor) también afecta el factor de potencia en el lado de entrada.
9. Frecuencia:
Significado: El número total de postes magnéticos (los postes N y S aparecen en pares) del campo magnético del motor. El número de polos generalmente se indica en la placa de identificación.
Visualización: determina la relación entre la velocidad sincrónica del motor y la frecuencia de la fuente de alimentación (n sincronización = 60f/p). Más postes dan como resultado una velocidad sincrónica más baja pero una densidad de torque potencialmente mayor. Parámetros que afectan los algoritmos de control (por ejemplo, ancho de banda del observador)
10. Clase de aislamiento:
Significado: se especifica la temperatura máxima de funcionamiento del material de aislamiento del devanado del motor. Los grados comunes son B (130 ° C), F (155 ° C), H (180 ° C).
Cómo mirar: determina el aumento de temperatura permitido y la capacidad de sobrecarga del motor. En un entorno o aplicaciones de alta temperatura que requieren una alta sobrecarga, es más seguro y más confiable elegir un motor con mayor grado de aislamiento (por ejemplo, F o H).
11. Clase de protección:
Significado: El código IP indica que la capacidad de la carcasa del motor para evitar que ingrese la materia extraña sólida (primer dígito) y los líquidos (segundo dígito). Por ejemplo, IP54 (a prueba de polvo e impermeable), IP65 (a prueba de polvo y resistente al agua), IP67 (resistente a la inmersión a corto plazo y a corto plazo).
Cómo mirar: seleccione de acuerdo con las condiciones de polvo, humedad y humedad del entorno de instalación del motor. Los ambientes al aire libre, húmedo y polvoriento requieren una clase de alta protección (como IP65 o superior)
12. Modo de enfriamiento:
Significado: el camino de la disipación del calor del motor. Los comunes son i0 411 (enfriamiento del ventilador, disipación de calor superficial), i0 416 (enfriamiento de aire forzado, ventilador externo), i0 410 (enfriamiento natural, sin ventilador), IC71W (enfriamiento de agua).
Cómo mirar: afecta la densidad de potencia y la capacidad de operación continua del motor. Los motores de alta potencia o compactos a menudo se enfrían al aire forzado o se enfrían agua
II. Parámetros de diseño/parámetros de circuito equivalente
Estos parámetros generalmente se utilizan para establecer el modelo matemático del motor (modelo de eje DQ) para el control vectorial, la simulación, la optimización de la eficiencia y la predicción del rendimiento.
1. Resistencia al estator:
Significado: El valor de resistencia de cada fase del devanado del estator bajo DC o baja frecuencia. La unidad es ohm. Generalmente se refiere a la resistencia de fase.
Cómo mirarlo: afecta el cálculo de la pérdida de cobre, la configuración de los parámetros de control de bucle de corriente y la estimación del aumento de la temperatura. Se ve significativamente afectado por la temperatura (aumentando con la temperatura)
2.D-EXIS inductancia / inductancia del eje Q:
Significado: el parámetro de inductancia del estator definido en el sistema de coordenadas de rotación del rotor (eje D y eje Q). El eje D está a lo largo de la dirección del campo magnético del imán permanente, y el eje Q es de 90 grados de ángulo eléctrico por delante del eje A.
LD: inductancia del eje D. Debido a la presencia de imanes permanentes, la reticencia magnética del circuito magnético del eje D es grande, y LD suele ser pequeña o incluso negativa (para PMSM integrada)
Inductancia del eje Q. El circuito magnético del eje Q pasa principalmente a través del estator y los núcleos del rotor, con baja resistencia magnética, y LQ suele ser grande. La:
Los parámetros clave determinan: torque electromagnético: t = (3/2) × p [ψ ± × LQ + (LD-LQ) × LD × LQ] (donde ψ ± representa el enlace de flujo del imán permanente). El principio fundamental de la generación del par de reticencia de PMSM se encuentra en LD = LQ (para IPMSM con una alta relación saliente polo). Capacidad magnética débil: los valores de LD más pequeños generalmente permiten rangos de operación de imán débiles más amplios y un rendimiento superior de alta velocidad. Ancho de banda de bucle actual y diseño del controlador: la inductancia constituye la constante de tiempo principal en el componente de inercia de primer orden del bucle actual. La forma de onda EMF de la parte posterior electromagnética y la amplitud están significativamente influenciadas por los niveles de saturación magnética (particularmente a altas corrientes).
3. Flujo de imán permanente:
Significado: La amplitud del enlace magnético generado por el imán permanente en el devanado del estator. La unidad es Weber. Por lo general, se refiere al enlace magnético máximo inducido por el campo imán permanente del rotor en el devanado del estator.
Cómo mirar: parámetros centrales! Determina:
Back EMF constante: Ke = ψpm * W (donde W es la velocidad angular del campo eléctrico). El EMF posterior es proporcional a la velocidad de rotación.
Constante de par: Kt ≈ (3/2) * P * ψ ± (para SPMSM montado en la superficie, LD ≈ LQ). El par es proporcional a la corriente del eje Q.
Velocidad base: la velocidad máxima que el motor puede alcanzar a voltaje nominal (cuando el EMF posterior está cerca del voltaje del bus)
El punto de partida del control magnético débil.
4. Volver a EMF constante:
Definición: La magnitud del EMF posterior (típicamente se refiere al EMF de la línea de línea) generada por revolución por un motor. Las unidades son V/(KRPM) o VS/°. Método de medición: directamente relacionado con el enlace de flujo de imán permanente ψpm (ke = ψpm × w). Se utiliza para estimar la EMF de retroceso a cualquier velocidad de rotación (E = Ke × N), lo cual es crucial para determinar el voltaje mínimo del bus requerido por las unidades, evitando la sobremodulación e implementar un control de imán débil. Medible a través de pruebas de tracción posterior sin carga.
5. CONSTANTE DE TORO:
Significado: La magnitud del par generado por el motor por unidad de corriente (para SPMSM, aproximadamente kt ≈ (3/2)*p*ψpm). La unidad es nm/a.
Referencia: Se utiliza para estimar el comando actual del eje Q requerido para un comando de torque dado (lq_ref = t_ref / kt). Tenga en cuenta que para IPMSM, KT no es constante debido a la existencia de torque de magnetoresistancia y varía con ID.
6. Constante de tiempo eléctrico:
Significado: Por lo general, se refiere a la constante de tiempo eléctrico del bucle actual, t_e = l / r (L generalmente se toma como LQ o promedio, r es la resistencia de fase)
Cómo mirar: es un parámetro clave del controlador de bucle de corriente de diseño (generalmente regulador PI), que determina la velocidad de respuesta del bucle actual.
7. Constante de tiempo mecánico:
Significado: Teniendo en cuenta la constante de tiempo de la inercia del motor y la carga, la fricción y otros factores, tm = j *r/(kt *ke) (j es la inercia total)
Cómo mirar: la velocidad de respuesta del anillo de velocidad es una referencia importante para el diseño del controlador del anillo de velocidad
8. Momento de inercia:
Significado: el momento de inercia del rotor del motor en sí. La unidad es kg · m? Cómo leer: afecta la capacidad de aceleración/desaceleración del motor, respuesta dinámica del circuito de velocidad y la sensibilidad a la perturbación de la carga. El Servo System tiene requisitos para hacer coincidir el momento de inercia.
9. Corriente máxima:
Significado: la corriente máxima a corto plazo (corriente máxima) permitida por el motor o el controlador. Por lo general, mucho mayor que la corriente nominal.
Cómo ver: determina la capacidad de sobrecarga a corto plazo (par máximo) del motor. Está restringido por factores como el calentamiento del devanado, el riesgo de desmagnetización de imán permanente y el límite de corriente del conductor.
10. Inercia de rotación:
Significado: el momento de inercia del rotor del motor en sí. La unidad es kg · m?
Cómo mirarlo: afecta la capacidad de aceleración/desaceleración del motor, la respuesta dinámica del anillo de velocidad y la sensibilidad a la perturbación de la carga. El Servo System tiene requisitos para la coincidencia de inercia rotacional.
11. Velocidad máxima:
Significado: la velocidad máxima que el motor F puede alcanzar bajo los requisitos de resistencia mecánica, vida útil, vibración y ruido. Por lo general, mucho más alto que la velocidad nominal.
Cómo ver: determina el rango de velocidad de funcionamiento del motor. A la mayor velocidad, generalmente se requiere un control magnético débil para mantener la salida de par.
¿Cómo se observa estos parámetros?
1. Propósito claro:
Selección y coincidencia: concéntrese en los parámetros de la placa de identificación (potencia, voltaje, velocidad, par, protección, enfriamiento) para garantizar que se cumplan los requisitos de carga, las condiciones ambientales y los requisitos de la fuente de alimentación. Centrarse en la eficiencia (costos operativos a largo plazo)
Configuración y control de la unidad: además de los parámetros de la placa de identificación, los parámetros de diseño (R, LD, LQ, ψpm) deben obtenerse como base para lograr el control de vectores de alto rendimiento (p. Ej., F0C). Los parámetros del controlador (PI Gain, o KE/KT) y los parámetros del observador deben establecerse de acuerdo con estos parámetros.
Análisis y simulación de rendimiento: se requiere un conjunto completo de parámetros de circuito equivalente (R, LD, LQ, ψpm, Y, coeficiente de fricción, etc.) para establecer un modelo matemático preciso.
Diagnóstico de fallas: los cambios en los parámetros (como una mayor resistencia pueden indicar sobrecalentamiento del devanado, y los cambios en la inductancia pueden indicar un cortocircuito interno o desmagnetización) pueden usarse como base diagnóstica.
2. Presta atención a la relación entre los parámetros:
Potencia, velocidad, torque: p = t*w
Voltaje, EMF de espalda, corriente, inductancia: V ≈ E + IR + JWLI (relación vectorial)
Torque, flujo magnético, corriente: t = (3/2)* p* [ψ ±* lq + (ld-lq)* ld* lq] velocidad, frecuencia, logaritm de polo: n_sync = 60f/p Fuerza electromotriz de retroceso constante y flujo magnético: ke∝ ψ ±
3. Comprender la naturaleza condicional de los parámetros:
Muchos parámetros (particularmente los parámetros de diseño R, LD y LQ) no son constantes: varían con la temperatura, la corriente (saturación magnética) y la posición del rotor (efecto de ranura del diente). El control de alto rendimiento debe tener en cuenta estos factores no lineales. Las especificaciones en las placas de identificación del equipo se definen en condiciones específicas (voltaje nominal, frecuencia, carga, enfriamiento y temperatura). Cuando las condiciones de funcionamiento reales difieren de estos escenarios ideales, el rendimiento puede desviarse del punto nominal.
4. Busque documentos oficiales:
Las especificaciones del motor se detallan en la tabla de información y especificaciones de rendimiento del equipo dentro de los manuales del producto. Los parámetros de diseño crítico (R, LD, LQ, ψpm, KE, KT) generalmente se proporcionan en los "parámetros técnicos", "parámetros de circuito equivalente" o secciones de "parámetros de control" del manual. Si no está disponible, se debe obtener la documentación de los fabricantes. Los parámetros detallados, como las curvas de inductancia, en diferentes niveles de saturación pueden requerir documentos de diseño especializados o informes de prueba.
5. Medición de prueba:
Si no se pueden obtener los parámetros oficiales, se requieren mediciones experimentales (como prueba de bloque, prueba de arrastre sin carga, medición del medidor LCR, algoritmo de identificación de parámetros, etc.). Sin embargo, esto requiere equipos y conocimientos profesionales.