








News










































El secreto detrás de la aceleración instantánea de los EV: dentro de la lógica de control de MCU
Los vehículos eléctricos (EV) se han convertido en sinónimo de aceleración silenciosa y emocionante. Toque el pedal y te empujan hacia adelante con una sensación de inmediatez que incluso el rendimiento de los autos de gasolina lucha por igualar. Pero, ¿qué crea este sentimiento de poder instantáneo? La respuesta se encuentra en lo profundo de la electrónica del vehículo, específicamente en un sistema pequeño pero poderoso conocido como la unidad de control del motor (MCU). Este blog te lleva bajo el capó para explorar el papel crítico de la lógica de control de MCU y cómo traduce la intención del conductor en un par sin costura y una aceleración estimulante.
¿Por qué los vehículos eléctricos se sienten tan rápido por un punto muerto?
Si alguna vez ha conducido o se ha sentado en un vehículo eléctrico, una de las primeras cosas que notará es cuán sorprendentemente rápido acelera de cero. Ya sea un Tesla Model 3, un Byd Dolphin o incluso un automóvil compacto de la ciudad de EV, la capacidad de respuesta es extraña. Esta "aceleración rápida" no es solo un truco: es una maravilla de la ingeniería como resultado de las transmisiones eléctricas y las decisiones en tiempo real del MCU del vehículo.
A diferencia de los vehículos de motor de combustión interna (ICE) que necesitan acumular energía gradualmente debido a retrasos mecánicos y de combustión, los EV ofrecen un par máximo al instante. Esto es inherente a los motores eléctricos, que no se basan en cambios de engranajes complejos o revoluciones de motor para alcanzar el máximo par.
Pero la capacidad motora cruda es solo una parte de la historia: la lógica de control de la MCU asegura que este par se entregue en el momento correcto, en la cantidad correcta y sin sacrificar la seguridad o la comodidad.

Importancia de la sensación de aceleración en la experiencia del usuario
La velocidad es una cosa: la aceleración percibida es otra.
Los fabricantes de EV hoy en día compiten no solo en el rango y el diseño, sino también por cuán suave, natural y emocionante se siente la aceleración. La "sensación" de aceleración afecta directamente:
- Confianza del conductor
- Rendimiento percibido del vehículo
- Percepción de la marca (piense en el "modo ridículo" de Tesla)
- Confort del pasajero (la aceleración desagradable puede ser inquietante)
Aquí es donde la lógica de control de motor juega un papel fundamental. La MCU adapta la curva de aceleración en función de los datos del sensor, las condiciones de la carretera, la carga del vehículo e incluso el modo de conducción (ECO, Sport, Normal). El resultado? Una experiencia de manejo que es visceral y controlable.
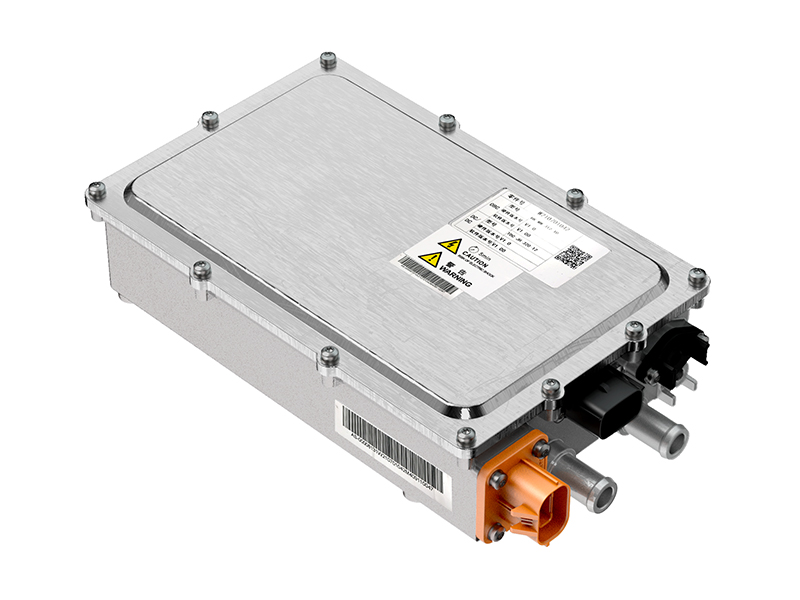
¿Qué es un MCU y qué hace en un EV?
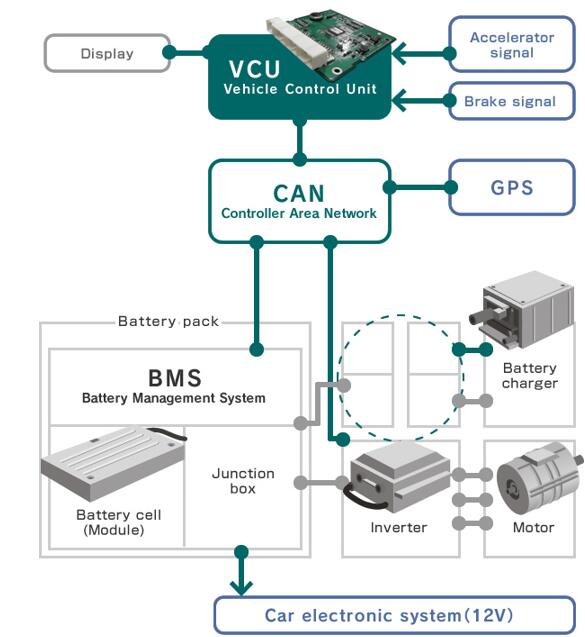
La Unidad de Control de Motores (MCU) es el cerebro digital responsable de administrar los motores eléctricos en un EV. Se encuentra entre el pedal del acelerador y el inversor del motor y actúa como la capa de control entre la intención del conductor y la propulsión eléctrica.
Funciones clave de un MCU:
- Interpretado de entrada del pedal del acelerador
- Calcula la salida de torque óptima
- Monitorea el voltaje de la batería, la temperatura y la corriente
- Administra la velocidad y la dirección de rotación del motor
- Coordina el frenado regenerativo
- Asegura la seguridad del sistema a través de la detección de fallas
En esencia, el MCU asegura que el motor eléctrico se comporte en línea con las expectativas del conductor, las condiciones del vehículo y los protocolos de seguridad, todo en tiempo real.
De pedal a potencia: traducir la entrada del controlador en movimiento
Examinemos una cadena de eventos típica:
1.Driver presiona el pedal del acelerador.
2. El sensor de posición del pedal (a menudo un sensor de efecto hall) envía una señal de voltaje al MCU.
3. El MCU lee esta señal e interpreta cuánto torque se debe entregar.
4.El también referencias:
- Estado de la batería
- Retroalimentación de control de tracción
- Temperatura del motor
- Modo de conducción
5. La MCU envía comandos al inversor, que ajusta el voltaje y el flujo de corriente al motor eléctrico.
6. El motor gira, y el par se envía a las ruedas.
Todo este ciclo ocurre en milisegundos, gracias a la velocidad de la electrónica digital y los poderosos procesadores integrados dentro de MCU moderno.
Cómo la MCU interpreta las señales de pedal de aceleración
Al contrario de la suposición simplista de que el pedal del acelerador es como una perilla de volumen, los EV modernos utilizan técnicas de interpretación sofisticadas:
Señales de pedal de doble canal
Por seguridad, el pedal generalmente tiene dos sensores redundantes que deben estar de acuerdo en la posición del pedal. ElMCULos revisan constantemente.
Mapeo de señales
El MCU no responde linealmente a la posición del pedal. Aplica curvas de calibración según el modo del controlador. Por ejemplo:
- Modo ecológico: entrega de torque más gradual
- Modo normal: respuesta equilibrada
- Modo deportivo: mapa de torque agresivo y de alta sensibilidad
Retroalimentación adaptativa
Algunas MCU usan aprendizaje automático o algoritmos adaptativos para aprender el comportamiento del conductor y ajustar la respuesta a lo largo del tiempo. Esto crea una experiencia de manejo exclusivamente personalizada.
Respuesta de par: la clave para la aceleración "instantánea"
El rasgo definitorio del rendimiento de EV es el torque instantáneo, y la gestión de este es uno de los trabajos más importantes del MCU.
Por qué los motores eléctricos ofrecen un par instantáneo
Los motores eléctricos generan par directamente a partir de la corriente eléctrica y los campos magnéticos: sin esperar ciclos de combustión, válvulas o compromiso del engranaje. Tan pronto como la corriente fluye a través del estator, el rotor gira.
El papel de MCU en el control de torque
Si bien los motores pueden entregar un par completo al instante, no siempre es seguro o eficiente hacerlo. El MCU modula cuidadosamente:
- Rampa de entrega de par (qué tan rápido se acumula el torque)
- Límites de tracción para evitar el deslizamiento de la rueda
- Límites térmicos para evitar el sobrecalentamiento del motor o la batería
- Optimización de energía para la eficiencia y el rango
Algunos sistemas también simulan un comportamiento similar al hielo para una mejor familiaridad o comodidad del conductor, especialmente en vehículos híbridos.

Optimización de retraso de control en MCU moderno
La latencia, el retraso entre la prensa de pedal y la respuesta del vehículo, es el enemigo del rendimiento de EV. Las marcas principales de EV apuntan a bucles de control de menos de 10 ms, con mínimo de fluctuación o variación.
Fuentes de retraso:
- Retraso de procesamiento de señal en el sensor de pedal
- Tiempo de cálculo algorítmico en el MCU
- Retraso de comunicación entre MCU e Inverter
- Retraso de respuesta motor (mínimo)
Técnicas de optimización:
- Microcontroladores más rápidos con CPU múltiples o DSP
- Programación avanzada para priorizar las tareas en tiempo real
- Modelos de control predictivo para anticipar la entrada del controlador
- Complejidad de pila de software reducida
Al minimizar estos retrasos, los EV ofrecen esa respuesta afilada que hace que la aceleración se sienta instantánea e intuitiva.
El futuro del control basado en MCU en los vehículos eléctricos
La tecnología MCU continúa evolucionando rápidamente para satisfacer las crecientes demandas en el rendimiento, la seguridad y la integración de IA.
Tendencias para ver:
1. Integración con ADAS y AI
Future MCU se integrará con los sistemas avanzados de asistencia del conductor (ADAS), adaptando el comportamiento motor en función de las condiciones de la carretera, la detección de peatones o los datos de tráfico.
2. Tuning Over-the-Air (OTA)
Así como Tesla puede aumentar la aceleración a través de las actualizaciones de software, espere que MCU admite el ajuste OTA para el rendimiento, la eficiencia o la seguridad, incluso la venta posterior.
3. Diagnóstico conectado a la nube
MCU informará cada vez más la salud del motor, el estado térmico y los patrones de uso a la nube para el mantenimiento predictivo y la optimización remota.
4. Coordinación multimotor
En los EV AWD y cuádruples, MCU necesitará sincronización multicanal para controlar la vectorización de torque, la tracción y el frenado regenerativo sin problemas.
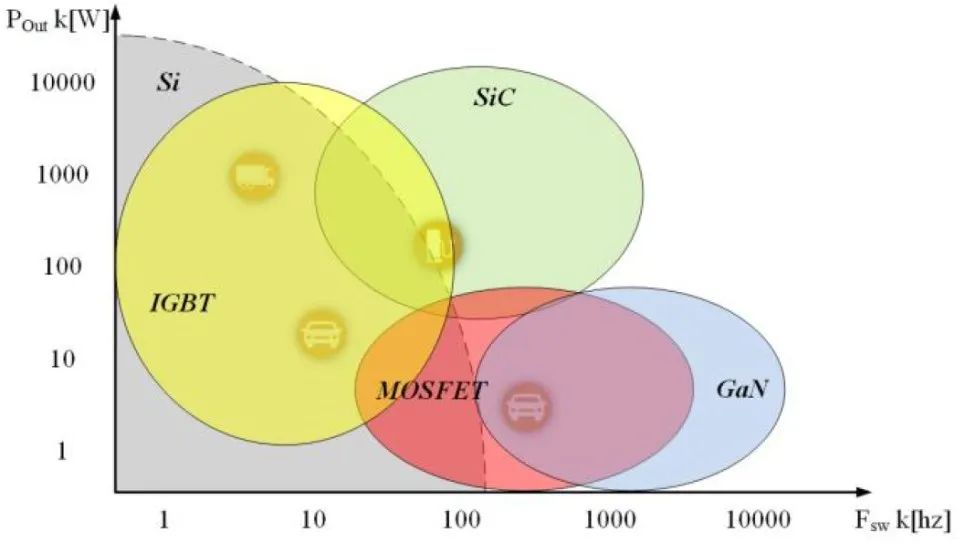
5. Compatibilidad de carburo de silicio (sic)
Como transición de electrónica de potencia a los sistemas basados en SIC, MCU debe admitir frecuencias de conmutación más altas, sobres térmicos más estrictos y manejo de errores avanzados.
Conclusión
La aceleración del rayo de vehículos eléctricos no es solo un efecto secundario de sus motores eléctricos, es el resultado del control digital meticuloso manejado por la unidad de control del motor (MCU). Desde la interpretación de la entrada del pedal y la administración de la entrega de par hasta minimizar los retrasos de control y garantizar la seguridad, el MCU es el héroe no reconocido de la revolución EV.
A medida que los EV continúan evolucionando, el papel de la lógica de MCU será aún más crítico: combinar el control en tiempo real con IA, conectividad en la nube y arquitecturas de transmisión cada vez más complejas. La próxima vez que sienta ese emocionante lanzamiento de EV, recuerde: no es solo la electricidad haciendo el trabajo, es una sinfonía de software, sensores y silicio orquestados por el MCU.